Motor Speed Control using BeagleBone PRU
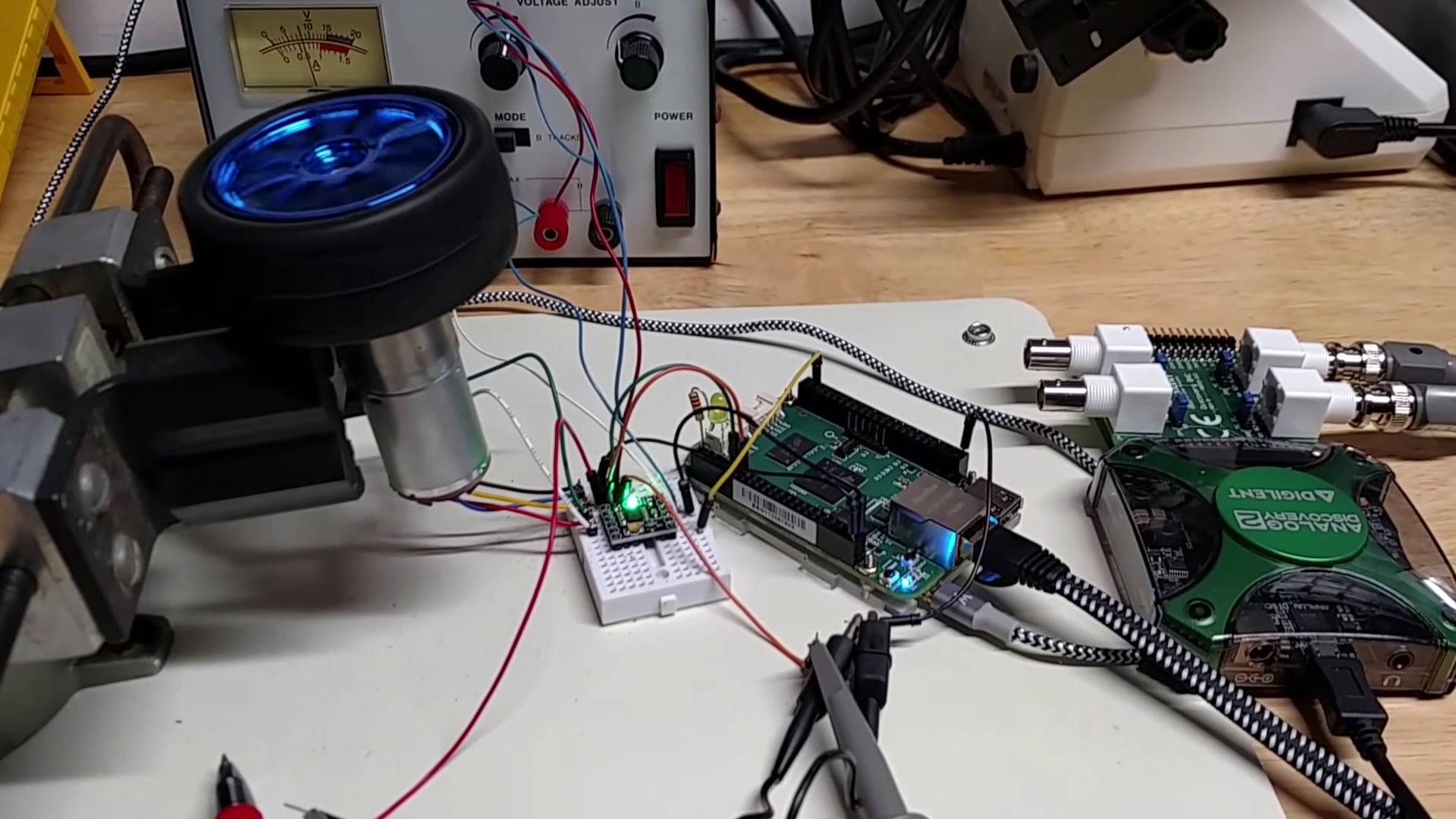
Greg Raven created this motor speed controller based on a Texas Instruments demonstration project. His implementation uses RemoteProc and RPMsg framework to connect the PRUs (Programmable Real-time Units) to Linux userspace. The PRUs are 32-bit RISC processors which offload real-time tasks from Linux running on the ARM processor. The system implements a Proportional Integral Derivative (PID) controller. The controlled […]