This project provides a step by step guide for the development of device driver blocks specifically for the BeagleBone Black.
Several standard blocks are developed including blocks for:
– GPIO read/write
– I2C read/write
– Analog Input read
– USR LEDs control
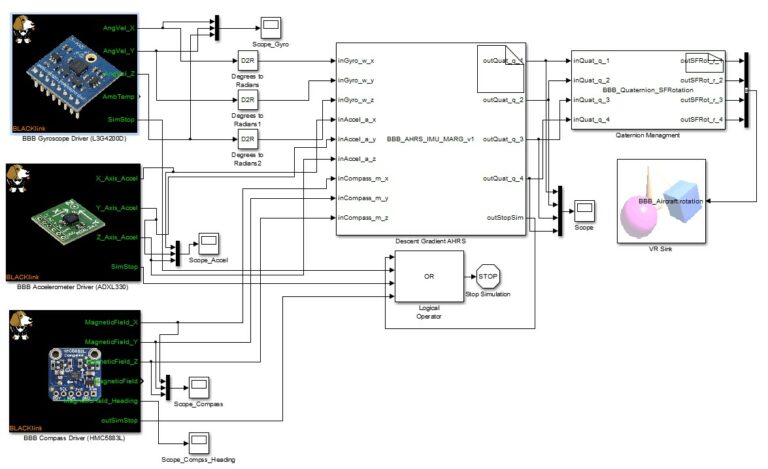
Specific sensor drivers are also developed for the:
– ADXL330 accelerometer
– L3G4200D gyroscope
– HMC5883L magnetometer
The developed driver blocks are then combined in a Simulink model for attitude estimation via a descent gradient sensor fusion algorithm. Finally a UI is developed to display sensor data and estimated attitude via Simulink 3D VR animation. All code is included.
Note that this project may prove especially useful for those using Matlab versions prior to R2014B where the Embedded Coder® Support Package for BeagleBone Black Hardware is not supported.
Comments are not currently available for this post.