I documented the steps to create my robot in the following series of posts:
Post 1: My first working robot part 1
Post 2: My first working robot part 2
Post 3: My first working robot part 3
Been playing with Bonescript: Using Javascript with Bonescript to program the BeagleBone Black
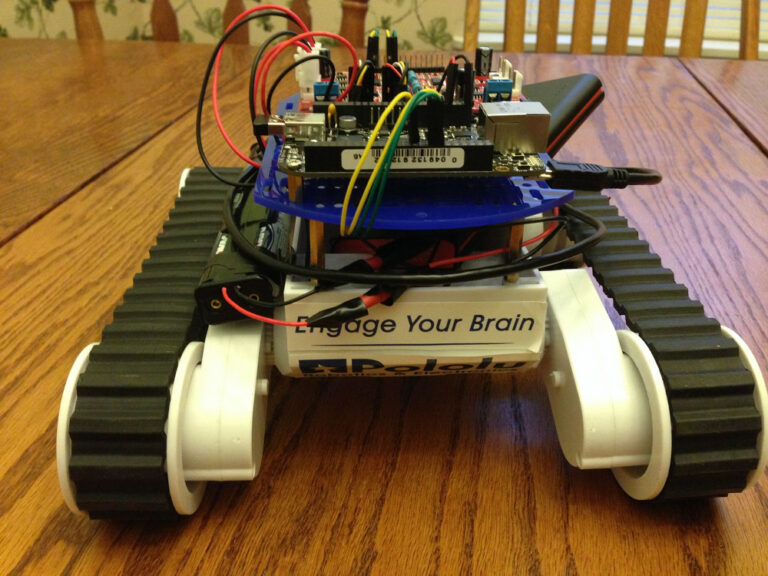
Each post contains images and videos that document my progress. At the end of the third post I have a full functional robot that I can control remotely.
This is an ongoing project with the goal of creating an autonomous robot. I will be updating this project as we build our robot.
We took the first steps to make the robot autonomous:
BeagleBone Black and the LV-MaxSonar-EZ2 Range Finder
Comments are not currently available for this post.